I am an Assistant Professor at the Shanghai Innovation Institute. Before joining SII, I was a Senior Research Fellow at the National University of Singapore, working with Prof. David Hsu; earlier, I was a robotics researcher at ByteDance Research with Tao Kong. I completed my PhD at Xi'an Jiaotong University in 2022, advised by Prof. Xuguang Lan.
现任 上海创智学院 助理教授。在此之前,曾在新加坡国立大学(NUS)担任高级研究员,与 David Hsu 教授合作;更早曾在字节跳动研究院担任机器人研究员,与 Tao Kong 博士合作。2022 年于西安交通大学取得博士学位,导师为 兰旭光 教授。
My research studies structuring uncertainty for open-world manipulation, developing physically-grounded and reliable intelligence for long-horizon robotic tasks in dynamic environments.
我的研究聚焦于 面向开放世界操纵的不确定性建模,致力于为动态环境中的长时程机器人任务构建具有物理基础、可靠可信的智能系统。
Open hours for students. 2 hours every week (20 mins per slot) for a casual chat: research, future plans, brainstorming, honest criticism of me, or anything in your mind. I am open to all of it; just send me an email.面向学生的开放时间。每周 2 小时(每位 20 分钟)自由交流:研究、未来规划、头脑风暴、对我的坦诚批评,或任何你心里想聊的话题。我对一切持开放态度,直接发邮件给我即可。
Join Our Group加入我们的团队
Our group launches at Shanghai Innovation Institute in May 2026. We are recruiting PhD students for the Fall 2026 or Spring 2027 intake, and research interns (remote or in person). We are also hiring a research engineer, with a competitive offer for the right candidate.
2026 年 5 月,我们将在 上海创智学院 组建研究组。现招收 博士生(2026 秋季或 2027 春季入学),以及 研究实习生(线上或线下均可)。同时招聘 研究工程师,为合适人选提供具有竞争力的待遇。
Research topics. We work on uncertainty-aware task specification and planning, object-centric scene representation for mobile manipulation, and composable, scalable manipulation skills. The broader theme is structuring uncertainty for open-world manipulation.
研究方向。 我们聚焦于面向不确定性的任务表达与规划,面向移动操纵的物体中心场景表征,以及可组合、可扩展的操纵技能。整体主题是 为开放世界操纵建模不确定性。
Who we look for. Self-motivated, with strong instincts for real-world robotics research: physical robots, contact, planning, mobility, manipulation policies, the parts LLMs cannot do for you. We ONLY focus on algorithms and systems that ground in hardware, not conceptually or virtually. Independent thinking that may comfortably disagree with ours is 100% encouraged.
期望的学生: 自驱,独立,对真实世界机器人研究有强烈兴趣, 包括但不限于物理机器人、接触动力学、规划、移动性、操作技能学习。我们只关注真正能落到硬件上的算法与系统,而不是局限于概念上的算法创新或仿真。愿意在学术问题上和所有人坦诚讨论甚至辩论。独立思考。
Please fill in this Form, and email me your CV, the problem you most want to work on, and one or two representative papers or projects.
请填写 该表格,并发送邮件附上你的 CV、最想研究的问题,以及一到两个代表工作或项目。
News近期动态
- May 2026 · Joining the Shanghai Innovation Institute as an Assistant Professor.2026 年 5 月 · 加入上海创智学院,出任助理教授。
- Apr 2026 · Hypothesis-driven Model Expansion accepted at RSS 2026.2026 年 4 月 · Hypothesis-driven Model Expansion 论文被 RSS 2026 录用。
- Apr 2026 · Organizing the Human-centric Mobile Manipulation workshop, accepted to RSS 2026.2026 年 4 月 · 组织的 Human-centric Mobile Manipulation 研讨会入选 RSS 2026。
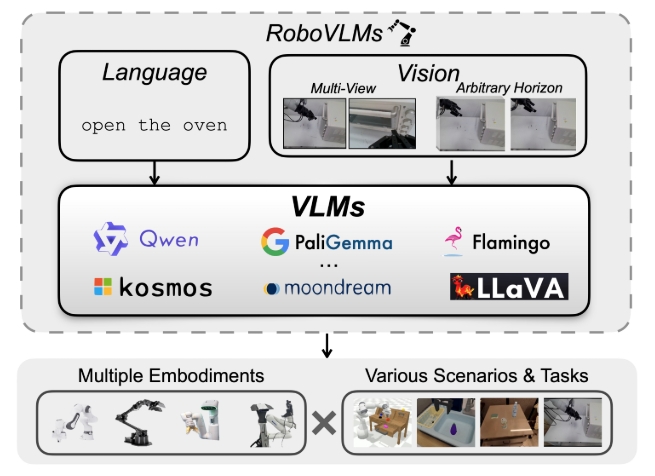
- Feb 2026 · RoboVLMs accepted at Nature Machine Intelligence.2026 年 2 月 · RoboVLMs 论文被 Nature Machine Intelligence 录用。
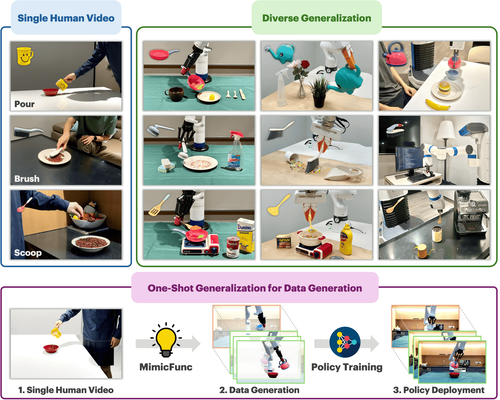
- Sep 2025 · ApBot and MimicFunc accepted at CoRL 2025; Chain-of-Action accepted at NeurIPS 2025.2025 年 9 月 · ApBot 与 MimicFunc 被 CoRL 2025 录用;Chain-of-Action 被 NeurIPS 2025 录用。
Selected Publications精选论文 [Full List完整列表]
† Corresponding Author, * Co-first Author† 通讯作者;* 共同第一作者