 |
Hanbo Zhang |
| Research Fellow @ AdaComp, National University of Singapore |
| Email: zhanghanbo163@outlook.com |
| Google Scholar| Linked In| GitHub |
| Previously: |
| Robotics Researcher @ ByteDance Research |
| PhD Candidate @ Xi'an Jiaotong University |
| Visiting PhD Student @ National University of Singapore |
|
I am currently a Postdoctoral Research Fellow in National University of Singapore working with Prof. David Hsu. Previously, I spent around 2 years working as a robotics researcher in ByteDance Research, working closely with Tao Kong. Before that, I graduated as a PhD in Control Science and Engineering in Xi'an Jiaotong University, Xi’an, China, in 2022, under the supervision of Prof. Xuguang Lan. We are recruiting interns working on human-robot interaction and uncertainty-aware planning for robotics! Drop me an email if you are interested. Research Keywords: Long-horizon Interactive Manipulation; Human-Robot Interaction; Robot Grasping System |
Recent Works
† Corresponding Author, * Co-first Author
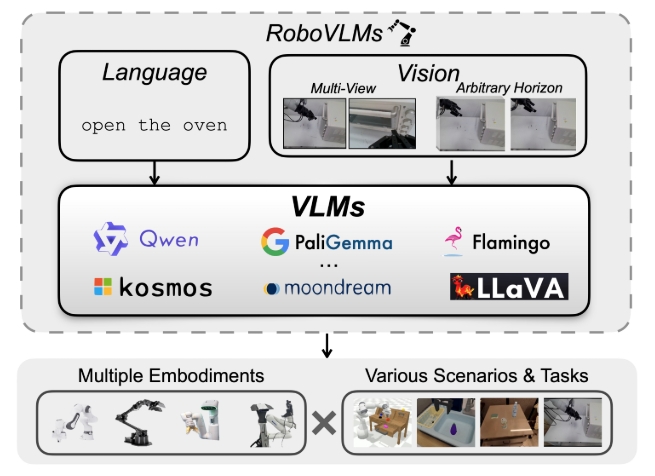 |
Towards Generalist Robot Policies: What Matters in Building Vision-Language-Action Models
Under Review. Xinghang Li, Peiyan Li, Minghuan Liu, Dong Wang, Jirong Liu, Bingyi Kang, Xiao Ma, Tao Kong†, Hanbo Zhang† , Huaping Liu†
|
 |
GR-2: A Generative Video-Language-Action Model with Web-Scale Knowledge for Robot Manipulation
Robotics Research Team, ByteDance Research, Tech. Report, 2024
|
 |
Towards Unified Interactive Visual Grounding in The Wild
ICRA 2024. Jie Xu, Hanbo Zhang† , Qingyi Si, Yifeng Li, Xuguang Lan, Tao Kong
|
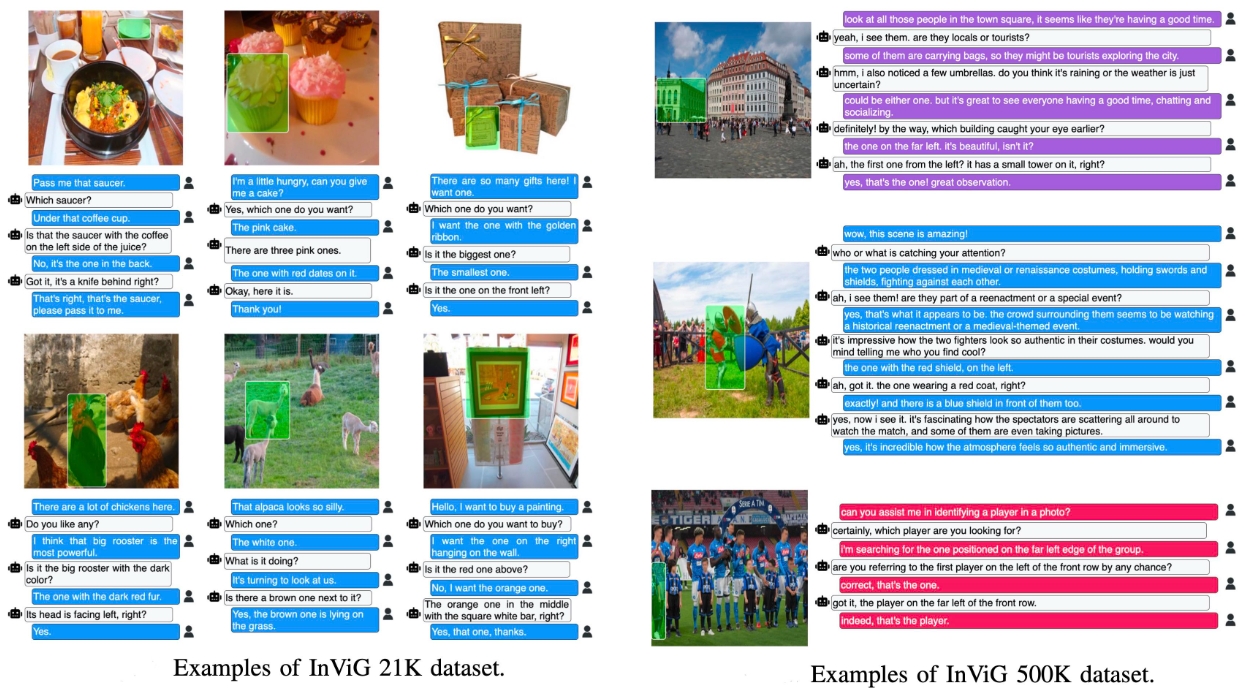 |
InViG: Benchmarking interactive visual grounding with 500k human-robot interactions
CVPRW 2024. Hanbo Zhang*, Jie Xu*, Yuchen Mo, Tao Kong
|
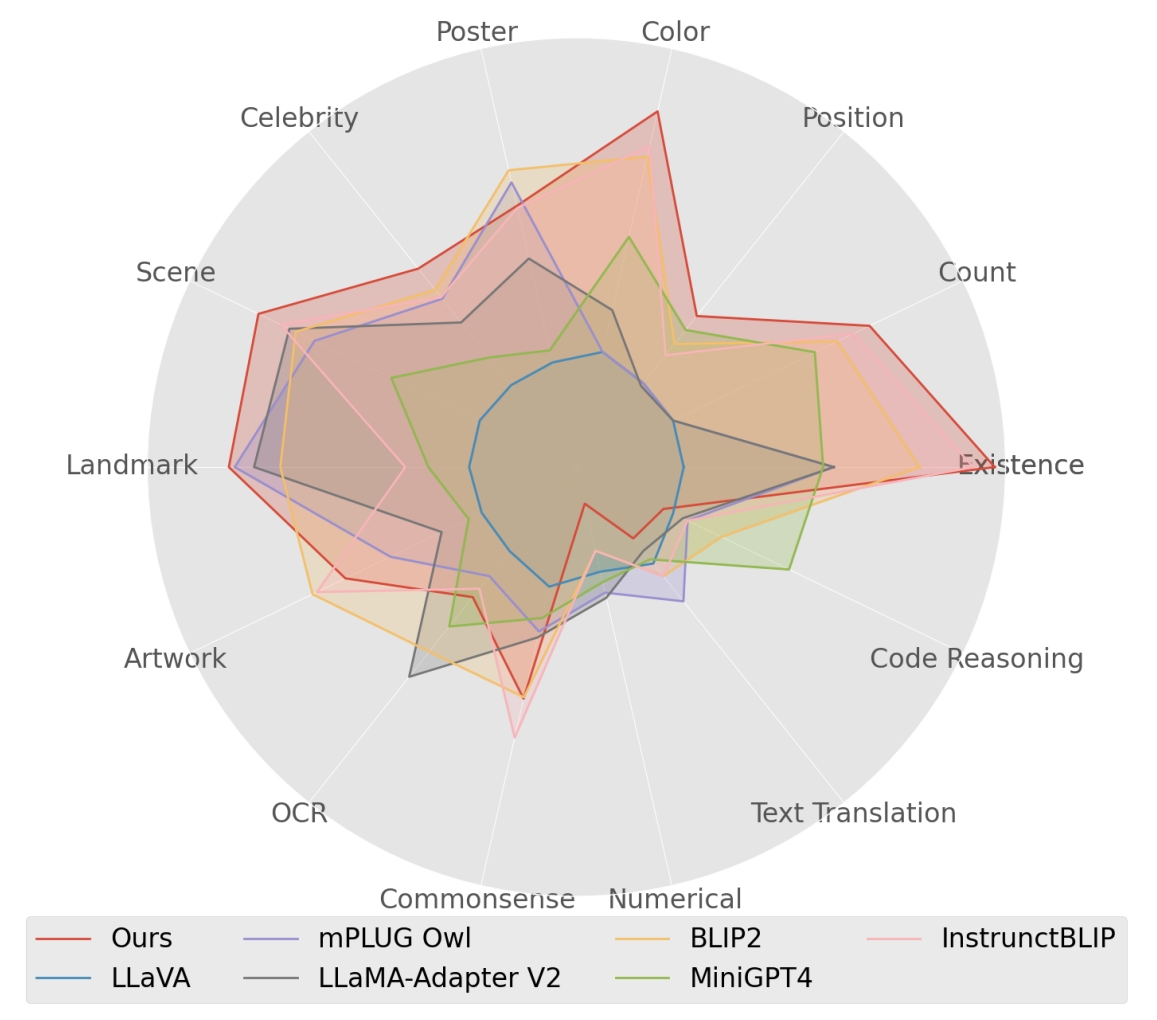 |
What matters in training a gpt4-style language model with multimodal inputs?
NAACL 2024. Ranks 11th of the most influential papers in NAACL 2024 Yan Zeng*, Hanbo Zhang*, Jiani Zheng, Jiangnan Xia, Guoqiang Wei, Yang Wei, Yuchen Zhang, Tao Kong
|
 |
REGRAD: A Large-Scale Relational Grasp Dataset for Safe and Object-Specific Robotic Grasping in Clutter
RAL with ICRA presentation, 2022. Hanbo Zhang*, Deyu Yang*, Han Wang*, Binglei Zhao, Xuguang Lan, Jishiyu Ding, Nanning Zheng
|
 |
INVIGORATE: Interactive Visual Grounding and Grasping in Clutter
RSS 2021. Hanbo Zhang*, Yunfan Lu*, Cunjun Yu, David Hsu, Xuguang Lan, Nanning Zheng.
|
Mentorship
| Site Bai | Ph.D. Candidate | Xinghang Li | Ph.D. Candidate |
| Chengzhong Ma | Ph.D. Candidate | Shiguang Sun | Ph.D. Candidate |
| Han Wang | Ph.D. Candidate | Jie Xu | ByteDance, Beijing |
| Chenjie Yang | ByteDance, Shanghai | Deyu Yang | SenseTime, Shanghai |
| Binglei Zhao | JD, Beijing |
Professional Activities
Associate Editor: RAL
Journal Reviewer: IJRR, AURO, RAL, TPAMI, TASE, TNNLS, TSMC
Conference Reviewer: RSS, ICRA, IROS, AAMAS